EU-ESPRIT 6068 ATHENA project (1992-1996)
The aim of the project was the automation of the operations performed currently by human drivers of earthwork equipment working within waste disposal sites. The objective was to operate the vehicle without having a driver on the machine by providing the vehicle itself with autonomous capabilities, and the control station with advanced teleoperation capabilities. The role of the AVIRES Lab in ATHENA consisted in the definition of the principal characteristics (descriptive features) of the environment, taking into account the acquisition phase. The environment representation module is implemented exploiting data fusion algorithms and knowledge-based techniques. In particular this task includes:
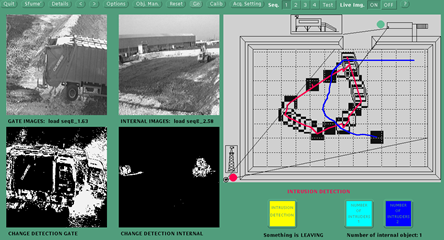
- Intruder detection in the sanitary landfill (monitored area) by using image processing techniques applied to b/w images acquired by means of two surveillance cameras;
- Tracking of the detected intruders inside the monitored area;
- Collision avoidance alarm

- Category: International Project