EDA – Defence R&T Joint Investment Programme on Force Protection – Project A-0444-RT-GC DAFNE (2009-2011) – Distributed and Adaptive Multisensor fusion Engine
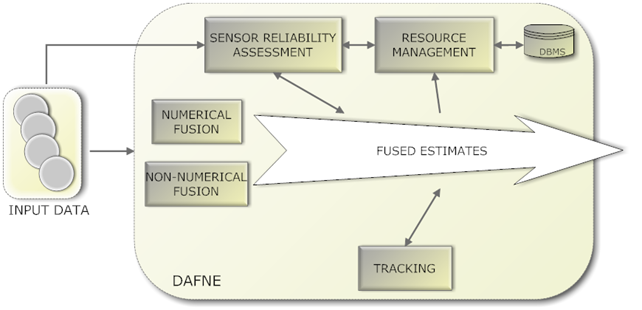
The project aimed at designing, building and experimenting with a real-time Distributed and Adapted Multisensor Fusion Engine (DAFNE) that combines data coming from heterogeneous sensors in order to generate reliable estimates about entities and events in an urban warfare scenario.
Some of the key points that have been addressed are:
- Fusion of heterogeneous information with associated heterogeneous uncertainty representation in a distributed fashion
- Fusion of asynchronous and out of sequence information.
- More use of a priori knowledge and contextual information.
- More adaptivity to the situation, e.g. environment and information need.
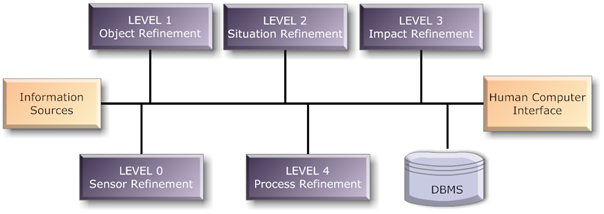
- Level 0 – Sub-Object Data Assessment: estimation and prediction of signal/object observable states on the basis of pixel/signal level data association and characterization;
- Level 1 – Object Assessment: estimation and prediction of entity states on the basis of observation-to-track association, continuous state estimation (e.g. kinematics) and discrete state estimation (e.g. target type and ID);
- Level 2 – Situation Assessment: estimation and prediction of relations among entities, to include force structure and cross force relations, communications and perceptual influences, physical context, etc.;
- Level 3 – Impact Assessment: estimation and prediction of effects on situations of planned or estimated/predicted actions by the participants; to include interactions between action plans of multiple players (e.g. assessing susceptibilities and vulnerabilities to estimated/predicted threat actions given one’s own planned actions);
- Level 4 – Process Refinement: adaptive data acquisition and processing to support mission objectives.
- Category: International Project